



一、为什么需要智能网联?
据鑫知网了解 未来的车将越来越聪明。单车智能主要包括决策层、高精度地图和定位、传感器、处理器等核心组件。L4/L5自动驾驶决策层主要依靠AI算法、深度学习等技术,为车辆提供驾驶行为决策判断;高精度地图和定位是实现自动驾驶的关键能力之一,是对自动驾驶传感器的有效补充;传感器是自动驾驶的眼睛,主要包括摄像头、毫米波雷达、激光雷达和超声波雷达等,例如超声波雷达探测距离为5米,激光雷达为100米,摄像头为150米,毫米波雷达为200米的融合感知组合;处理器是汽车的大脑,车载计算平台包括芯片、显卡、硬盘、内存等,一般L2需要计算力 <10TOPS,L3需要计算力30~60TOPS,L4需要计算力>100TOPS。
未来的汽车不仅是数据发送和接收方,还是计算节点,更是数据分享节点
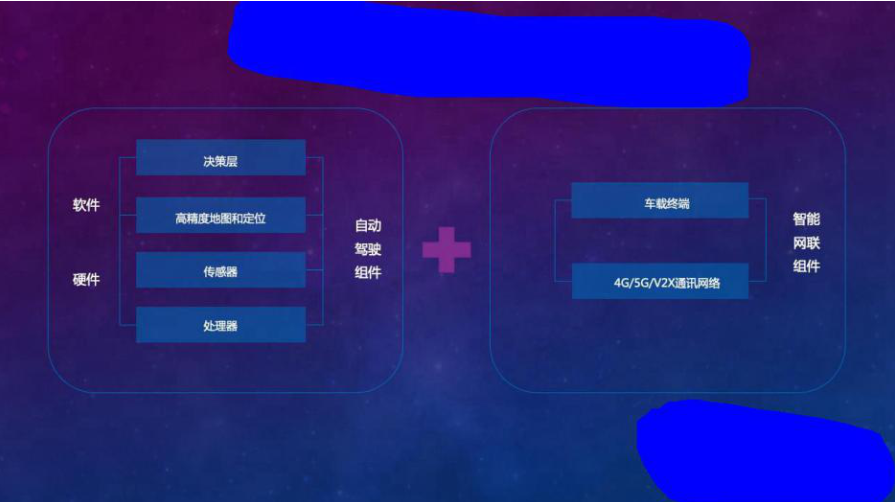
未来的汽车不仅是数据发送和接收方,还是计算节点,更是数据分享节点。但是聪明的车仅仅依靠单车智能,存在如下3个方面的问题。 一是实现自动驾驶L4/L5,存在单车智能无法解决的场景,比如前方大车遮挡住红绿灯、大车遮挡探头、前方几公里外交通事故预知等。这些场景,依靠车联网的上帝视角可以较好解决。 二是还存在一些场景,仅依靠单车智能虽然能够较好解决,但依然存在长尾效应。所谓长尾效应,是指99%力量用于解决1%的问题。比如依靠单车视觉识别交叉路口红绿灯信息,由于存在树木遮挡、强光效应、极端天气等因素,无法做到100%准确。对于这类存在自动驾驶长尾效应的场景,可以利用车联网的车路协同技术辅助解决。 三是自动驾驶如果仅仅依靠单车智能,需要依托于多传感器融合,包括视觉、毫米波雷达、激光雷达和高精度地图定位等技术。采用车联网技术将有效降低L4/L5自动驾驶的汽车端成本压力,可以降低激光雷达或者大幅度降低激光雷达规格,以及高精地图采集成本。 以上3方面因素导致聪明的车不仅是车本身聪明,还需要和外界实现联网交互,聪明的车=单车智能+智能网联,如图1所示。L1阶段主要依靠摄像头和算法芯片,L2阶段主要依靠摄像头、毫米波雷达和控制执行端,L3和L4阶段则需引入激光雷达、高精地图和智能网联


